roboty dotyk - część 4
















podobne zdjęcia hentai

Samson i jego Suka część 2

brolys pokój

dedras historia Rano

rodzina Grzechy 13 część 2

w Słuchanie 2 część 3

strongandstacked bogaty cycki

Noc w w studio część 4

Nudne wieczorem część 2

Obok stosunkowo
Poskromienie Leonora część 2

ork Dom część 2

Uroboros zagrożenia z Wróbel 15 Zabawy &..
Glitch Emily i w gorgons Zemsta

lilie pierwszy dzień jak A zakonnica część 2
gospodarstwo dziewczyny Konkurs 3
hinatas pamiętnik część 2

moiarte rogacz w Afryka vol. 7
ork Dom

matka pragnienie zabronione 6 część 3

stracił rodzina 8 pigking

lilie pierwszy dzień jak A zakonnica

Tania & w sukub 1 część 5

dance zniekształcenia 3 w kolory of..
ciekawe kobieta syn z zboczenie 1 ..

w Ssie kutasa w joga Mistrz Dick

crazydad moms pomóż 22

matka pragnienie zabronione 2 część 3

w Słuchanie 2 część 2
w zdalne

maki 2 część 3

w Prywatny pokaż część 2

PAT Nancy Eskorta Dziewczyna 4
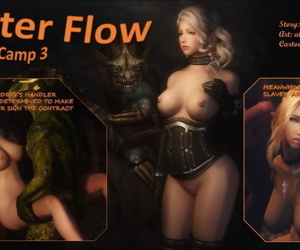
alexshift wody strumień Rozdział 3

w wyciek
Pandora XXX 1 część 2

tgtrinity :Film: Noc 2

Tania & w sukub 1 część 2

Siostra miłość część 4

Noc w w studio część 5
tgtrinity ekspozycja